로봇 중재가 뇌졸중 환자의 상지기능에 미치는 영향: 무작위대조연구에 대한 메타분석
The Effect of Robotic Intervention on Upper Limb Function in Individuals with Stroke: A Meta-Analysis of Randomized Controlled Trials
Article information
Trans Abstract
Objectives
The main symptom of stroke is upper limb function deficit. Robotic intervention has been applied to treat the paretic upper limb. Through this meta-analysis, we investigated the effect of robotic intervention on upper limb function recovery of individuals with stroke.
Methods
The analyzed studies were identified through electronic search engines such as PubMed, CINAHL, MEDLINE for the last 5 years. The PEDro scale was used to rate the methodological quality of included studies. Meta-analysis is performed to analyze the sample size, means, and standard deviations in selected studies.
Results
Ten randomized controlled trails were included for meta-analysis. PEDro scale was more than 6 points in all studies. Three hundred twenty subjects participated in included studies. In order to statistically analyze the effect size of the robotic interventions, the outcomes of studies were classified into upper limb function (ULF) and activities of daily living (ADL). In consideration of heterogeneity of effect size, we used random effect model. Meta-analysis of 10 trials showed “small effect size”. The effect size of ULF was 0.288 and the effect size of ADL was 0.265.
Conclusions
Robotic intervention was not more effective than other dose-matching conventional therapies. Therefore, it is necessary to select appropriate individual interventions reflect characteristics of the individuals with stroke and robotic interventions may be used as a complementary methods to conventional therapy.
서 론
뇌졸중 환자에게서 빈번하게 발생하는 장애는 상지기능의 손상으로 발병 환자의 80% 수준에서 증상이 나타난다[1]. 특히 뇌졸중 발병 후 1년 동안, 상지기능의 손상은 환자의 불안감을 높이고 삶의 질을 낮아지게 만든다[2,3]. 기능적으로도 마비측 상지를 사용하지 않음으로 인하여 독립적인 일상생활이 어렵게 된다[4,5].
뇌졸중 발병 후 상지기능 손상의 회복은 환자의 삶의 질과 독립적인 일상생활의 참여에 직접적인 영향이 있는 만큼 뇌졸중 재활에서 중요한 치료적 영역이다[6]. 손상된 상지기능을 회복시키기 위해서는 치료의 일관성과 강도가 중요하다[7]. 손상된 뇌신경의 가소성을 유발시키기 위하여 환자는 지속적이고 반복적으로 상지를 움직여야 하는데, 이것을 실현하려면 일상에서 목적을 가지고 활동하고 지속적인 동기부여가 되어야 한다[8]. 전통적으로 높은 강도의 대표적인 상지 재활 훈련은 강제유도 운동치료(constraint-induced movement therapy)가 있다[9]. 그러나 강제유도 운동치료는 환자의 불편감과 낙상과 같은 위험성을 가지고 있고 많은 환자들이 중도에 포기하는 제한점을 가지고 있다[10]. 이후 컴퓨터 기술이 발달하고 강제유도 운동치료의 제한점을 보완하기 위하여 가상현실(virtual reality)을 이용한 상지 재활 훈련이 실시되었다. 가상현실을 이용한 훈련은 반복을 통한 운동의 강도를 높게 유지하면서 지속적으로 환자에게 동기를 부여할 수 있다. 또한 화면 안에서 자신의 모습을 볼 수 있으므로 거울 뉴런을 활성화하여 뇌의 가소성을 촉진할 수 있다는 장점이 부각되었다[11].
컴퓨터와 공학의 발전은 로봇 시스템을 뇌졸중 상지 재활치료에 적용할 수 있게 해주었다. 치료적으로 적용되는 로봇 기술은 다양한 환경에서도 상지기능 향상을 위한 활동의 규칙성과 강도를 일정하게 유지하도록 한다[12,13]. 그러나 뇌졸중 상지 재활에 적용된 로봇 중재 효과의 근거는 아직 명확하지 않다. 사전에 실시된 체계적 문헌연구에서는 로봇을 활용한 재활 훈련이 비슷한 강도의 전통적인 뇌졸중 상지 재활 훈련과 비교하여 상지 운동 조절과 기능, 일상생활 활동 향상에 효과가 있다고 분석하였다[14]. 그러나 다른 체계적 고찰과 메타분석에서는 로봇 상지 재활이 시간적으로 동일하게 제공된 전통적 치료와 비교하였을 때 통계적으로 효과크기가 작다는 결과를 보고하였다[15]. 또한 최근에는 로봇 중재의 형태와 환자의 특성, 중재 기간 등의 요인에 따라 효과성의 편차가 크다는 분석을 발표하였다[16]. 이와 같이 현재 로봇 중재의 적용은 뇌졸중 상지 재활 현장에서 효과성에 대한 논란이 지속되고 있다.
그러므로 본 연구에서는 사전 문헌연구의 발표 시기와 기술의 발전 수준을 고려하여, 최근 5년 동안 뇌졸중 상지 재활에 적용된 로봇 중재 기술의 효과성을 알아보고자 하였다. 특히 질적으로 잘 통제되고 설계된 무작위대조연구를 선정하여 효과성의 근거를 명확히 하고자 하였다. 본 연구의 목적은 로봇 중재가 뇌졸중 상지기능 회복에 미치는 영향을 메타분석을 통하여 통계적으로 분석하기 위함이다.
연구 방법
연구 설계
본 연구에서는 뇌졸중 환자의 상지 재활에 적용된 로봇 중재에 대한 연구 중 무작위대조연구를 대상으로 메타분석을 실시하였다. 로봇 중재로는 다양한 로봇의 종류와 적용 방법 및 기간을 추출하였고 종속변인은 환자의 독립적인 일상생활의 참여에 직접적인 요인이 되는 ‘상지기능’과 ‘일상생활동작’으로 분류하여 분석하였다.
분석대상 및 자료수집
분석할 연구를 수집하기 위하여 최근 2013년부터 2017년까지 5년 동안 출판된 국외 논문을 대상으로 하였다. 검색을 위한 데이터베이스 검색엔진은 PubMed와 CINAHL, MEDLINE을 사용하였다. 검색을 위한 전략은 의학주제용어(medical subject heading, MeSH)와 주요 개념의 핵심 단어를 사용하였다. 사용한 주제어와 전략은(robot OR robotic) AND (rehabilitation OR therapy OR intervention) AND upper AND stroke [MeSH]이었다. 수집된 연구는 두 명의 연구자가 독립적으로 선정하였고 의견이 일치하지 않을 경우에는 토의를 거쳐 최종적으로 결정하였다. 검색 및 수집, 선정 과정은 Figure 1에 제시하였다.
Research flow diagram.
대상 연구 선정 기준
분석을 위한 연구를 선정하기 위하여 (1) 무작위대조 임상실험연구, (2) 로봇을 설계하고 제작하는 연구가 아닌 로봇을 중재로 사용한 연구, (3) 상지 기능과 일상생활동작 수준을 표준화된 평가 도구로 측정한 연구, (4) 주요 측정치의 평균과 표준편차, 대상자 수를 제시한 연구, (5) 사례연구, 단일실험연구, 종설, 체계적 문헌고찰이 아닌 실험연구, (6) 약물이 적용되지 않은 연구, (7) 뇌졸중 환자를 대상으로 실험군과 대조군의 동질성이 확보된 연구, (8) 영어로 출판된 연구와 같은 기준을 적용하였다.
질적 메타분석 방법
선정된 연구의 질적 수준을 평가하기 위하여 PEDro scale을 사용하였다. 질적 평가는 두 명의 연구자가 독립적으로 실시하였고 일치하지 않을 경우 토의를 통하여 최종 PEDro score를 산출하였다. PEDro score는 총 10점으로 구성되어 있고, 3점 이하는 ‘나쁨’, 4-5점은 ‘보통’, 6-8점은 ‘좋음’, 9-10점은 ‘매우 좋음’으로 분류된다[17]. 본 연구에서는 6점 이상의 ‘좋음’과 ‘매우 좋음’으로 평가되는 연구만을 선정하여 분석하였다.
분석 연구의 일반적 특성
본 연구에서 최종적으로 선정된 무작위대조연구는 10편이었다. 연구에 참여한 대상자는 실험군이 163명, 대조군이 157명으로 총 인원은 320명이었다. 모든 대상자의 진단은 뇌졸중이었고, 대상자의 발병 후 기간은 3개월 이내의 급성기 연구가 5편, 1년 이상의 만성기 연구가 5편이었다. 상지 재활 중재에 사용된 로봇의 종류로는 ‘Haptic Knob Robot’, ‘Robot-assisted group therapy (Bi-Manu-Track, Reha-Digit, Reha-Slide)’, ‘Bi-Manu-Track Robotic Arm Trainer’, ‘InMotion2 Shoulder-Elbow Robot’, ‘Myomo e100’, ‘MIT-MANUS/InMotion2’, ‘Modified Hand Exoskeleton Robot’, ‘Robotic Therapy System-ReoGo’, ‘Arm-Assist Robotic Trainer’들이 사용되었다. 중재 기간은 최소 3주 15회기에서 최대 12주 60회기로 실시되었다. 효과를 측정하기 위한 평가 영역에서 상지 기능 평가 연구가 10편 중 10편이었고, 일상생활동작 평가 연구는 10편 중 6편이었다. PEDro score에 따른 연구의 질적 수준을 보면 6점 연구가 1편, 7점 연구가 6편, 8점 연구가 3편이었다(Table 1).

Characteristics of included studies
계량적 메타분석 방법
분석 연구의 통합적 효과크기를 분석하고 통계적 동질성, 출판 편의를 검정하기 위하여 Comprehensive Meta-Analysis 3.0 (Biostat, Englewood, NJ, USA)을 사용하였다. 효과크기의 통계적 동질성을 검정하기 위하여 Q-value를 사용하였는데, Q-value의 p값이 0.1보다 크고 작음에 따라 효과크기의 이질성이 낮고 높음을 판단할 수 있다. 그러나 Q-value만으로 효과크기의 이질성을 결정하는 것은 통계적으로 한계가 있으므로, 연구자가 분석 연구의 대상자 특성, 중재 방법, 변인 측정의 속성 등을 고려하여 고정효과모형 또는 랜덤효과모형을 선택하여야 한다[28].
분석 연구들의 통합적 효과크기를 산출하기 위하여 연구의 참여 대상자 수, 실험군과 대조군의 평균 또는 평균의 차이, 표준편차 또는 평균 차이의 표준편차, p값 등을 사용하였다. 각 연구의 종속변인들은 ‘상지기능’과 ‘일상생활동작’으로 분류하고 통합하여 효과크기를 산출하였다. 효과크기는 값이 0.4 미만일 경우 ‘작은 효과크기’, 0.4 이상 0.8 미만의 범주일 경우 ‘중간 효과크기’, 0.8 이상일 경우는 ‘큰 효과크기’로 해석하였다[29]. 통합된 효과크기는 숲 그림(forest plot)으로 제시하였다.
출판 편의 검정을 위해서 깔때기 점도표 법(funnel plot)과 Fail-Safe Number값을 사용하였다. 깔때기 점도표 법에서 점들이 효과크기를 중심으로 대칭적이고 균등하게 분포되어 있으면 출판편의가 존재하지 않는 것으로 보았고 Fail-Safe Number값이 크고 p값이 0.05보다 작으면 출판 편의가 존재하지 않는 것으로 해석하였다[30].
연구 결과
계량적 메타분석 결과
통계적 동질성 검정
효과크기의 동질성 검정을 위한 Q-value에서, 상지기능의 효과크기에 대한 Q 4값은 5.464 (df=9, p = 0.792), 일상생활동작의 효과크기에 대한 Q값은 2.737 (df=5, p = 0.740)로 제시되었다. Q-value에 근거하면 효과크기의 이질성은 낮은 수준이나 연구 참여 대상자들의 특성이 동일하지 않고 효과 측정 방법과 측정치의 속성이 다르므로 본 연구에서는 랜덤효과모형을 선택하였다. 그러나 T2값이 0이므로 두 모형의 통계적 차이는 없었다(Table 2).
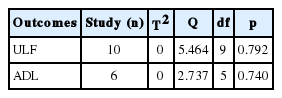
Statistical heterogeneity
상지기능에 대한 로봇 중재 효과
상지 로봇 중재가 상지기능에 미치는 효과를 조사한 연구의 대상자의 총합은 실험군이 163명 대조군이 157명이었다. 통합된 효과크기는 0.288 (신뢰도 95%, 신뢰구간 0.067-0.510)로 작은 효과크기를 나타냈다(Figure 2).
Effect of robotic intervention on upper limb function. CI, confidence interval.
출판 편의 검정
상지기능과 일상생활동작에 대한 효과크기를 분석한 연구들에서는 깔때기 점도표 법에서 각각 10개와 6개의 점들이 효과크기를 중심으로 균등하게 대칭적으로 분포되어 있지 않고 Fail-Safe Number값은 각각 10 (p <0.05)과 6 (p <0.05)으로 높지 않으므로 통계적으로 출판 편의의 가능성을 배제할 수 없다(Figure 4).
Funnel plots of outcomes. (A) Upper limb function outcomes; (B) Activities of daily living outcomes.
고 찰
본 연구의 목적은 최근 5년 동안 뇌졸중 상지 재활에 적용된 로봇 중재에 대하여 알아보고 ‘상지기능’과 ‘일상생활동작’에 미치는 효과성을 통계적으로 알아보기 위함이었다. 특히 PEDro score 6점 이상의 질적으로 잘 통제되고 설계된 무작위대조연구를 대상으로 메타분석을 실시하였다. 분석 대상이 된 연구는 최종적으로 10편이었다. 각 연구들의 독립변인인 로봇 중재의 형태에 따라서는, 분류되는 논문 편수가 적어 따로 분석하지 못하였다. 종속변인은 뇌졸중 환자의 독립적인 일상생활에 직접적으로 영향을 미치는 ‘상지기능’과 그 결과인 ‘일상생활동작’으로 분류하여 통합된 효과크기를 산출하였다.
분석 결과 ‘상지기능’에 대한 로봇 중재의 효과크기는 0.288로 작은 효과크기를 나타내었고, ‘일상생활동작’에 대한 효과크기 또한 0.265로 작은 효과크기를 보였다. 이러한 결과는 전통적인 뇌졸중 상지 재활과 비교하여 우월한 치료적 효과가 있다고 보기는 어려울 것이다. Mehrholz et al. [31]은 그들의 첫 번째 체계적 문헌연구에서 1950년부터 2011년까지 장기간의 상지 로봇 중재 연구를 분석한 결과, 로봇 중재가 표준화된 상지 재활 또는 전통적인 집중치료에 비하여 상지의 운동조절 기능과 일상생활동작에 유의미한 효과가 있다고 보고하였다. 그러나 2년 후 추가로 연구된 문헌고찰에서는 로봇 중재의 효과성이 매우 낮다고 보고하였다. 그 원인으로는 로봇의 종류가 다양해지고 중재 환경과 참여 대상자의 특성이 매우 달라져 효과크기의 편차가 커졌기 때문으로 고찰하였다[16]. 본 연구에서도 상지 재활을 위한 로봇의 형태가 대부분 달랐다. 같은 로봇 기종을 사용한 연구는 Bi-Manu-Track Robotic Arm Trainer가 2편[20,27], InMotion2가 2편[21,23]이었고, 나머지 연구에서는 모두 다른 기종의 로봇을 사용하였다. 연구 참여 대상자 또한 뇌졸중 환자로 진단은 동일하지만, 치료 회복에 영향을 줄 수 있는 발병 후 기간은 3개월 이내가 5편, 1년 이상이 5편으로 달랐다. 상지기능을 측정하는 평가도구도 단순한 상지협응을 측정하는 도구에서 상지기능으로 활동에 참여하는 것을 측정하는 도구까지 다양하였다. 이러한 상황은 로봇 중재가 상지기능 회복을 위하여 광범위한 환자군과 환경에서 사용되고 있다는 근거가 될 수는 있지만 통계적인 효과성이 낮아지고 있다는 측면은 임상적으로 시사하는 바가 크다.
Veerbeek et al. [32]은 체계적 메타분석에서는 로봇 중재가 다른 전통적인 중재에 비하여 그 효과성이 충분치 않다고 분석하였다. 이들은 로봇 중재의 효과성이 낮은 원인을 중재의 특성에서 제시하였다. 즉 중재를 적용하는 치료사의 로봇에 대한 전문적 지식 여부, 로봇의 설치와 환자의 특성에 맞는 적용 및 설계, 적용하는 시기의 적절성 등 중재의 설계가 치료적 효과에 많은 영향을 줄 수 있다는 것이다. 이와 같은 체계적인 문헌연구의 결과는 본 연구의 분석결과를 지지한다. 본 연구자는 로봇 중재의 효과성이 충분치 않은 것에 대하여, 중재의 규칙성과 강도의 측면에서 분석하였다. 본 연구에서 분석 대상이 된 연구들은 대부분 로봇 중재와 같은 시간과 강도의 다른 치료를 진행하였다. 이때 좀 더 주의 깊게 보아야 할 것은, 중재 시간에 운동의 규칙성과 강도를 로봇 중재가 다른 보편적인 치료보다 월등히 많게 유지할 수 있는가에 대한 문제이다. 로봇 외에도 환자의 움직임에 대한 반복과 지속적인 강도를 유지하는 방법들은 많이 존재한다[11]. 그러므로 일상이 아닌 집중적인 치료 시간에 대한 효과를 비교할 때는 로봇 중재와 전통적인 다른 중재의 차이를 경험하기 어려울 것이다. 이와 같은 제한점을 극복하기 위해서는 수시로 착용이 가능한 로봇 치료기의 적용을 통해 활동의 지속 시간을 늘리고 강도를 높이는 시도가 필요할 것이다.
본 연구의 제한점은 로봇의 형태와 기능적 차이에 따른 분석이 이루어지지 못하였다는 것이다. 분석 연구들에서 상지 재활에 적용된 로봇의 중점 기능이 조절하는 관절의 위치(어깨, 팔꿈치, 손가락 등)에 따라 달랐다. 그러나 로봇의 기능에 따른 종류별 연구 논문의 편수가 적어 분석이 이루어지지 못하였다. 그러므로 로봇 기능의 옵션에 따라 상지 기능에 어떠한 영향을 미치는지 분석해볼 필요가 있다. 또한 로봇의 가격이 비싸다는 것을 고려할 때, 본 연구에서는 로봇 중재의 비용 효과에 대한 분석을 실행하지 못하였다. 로봇 중재의 효과성이 충분치 못할 경우 로봇에 투자되는 비용 대비 효과성에 대한 분석이 필요할 것이다. 다음으로 본 연구에서는 대상 연구 수의 부족으로 연구 참여 대상자들의 상지 마비에 대한 심각성 정도와 발병 후 기간에 따른 효과성 분석이 이루어지지 못하였다. 이는 연구 선정의 질적 기준을 높여 최종 분석 연구의 범주가 좁아진 결과이기도 하다. 뇌졸중 재활에 있어서 초기 손상의 심각성과 발병 후 기간은 이후 기능 향상에 영향을 미칠 수 있으므로 다음 연구에서는 연구의 질적 기준을 낮추고 분석 대상 연구 수를 늘려 연구 대상자의 특성에 따른 조절 변수의 유의성을 알아보는 것도 임상적 의미가 있을 것이다. 마지막으로 본 연구에서 통계적으로 효과크기의 이질성은 나타나지 않았으나, 각 연구의 참여 대상자 특성, 중재의 기간 및 발병 후 기간 등과 같은 연구 특성의 이질성을 통제하지 못하였다는 제한점이 있다. 또한 출판 편의의 가능성을 배제할 수 없으므로 결과의 해석에 신중을 기해야 할 것이다. 뇌졸중 재활 현장에서 발전하고 있는 컴퓨터 공학 및 기계 공학 기술을 적용하는 것은 시대적으로 중요하고 의미 있는 시도이다. 그러므로 환자들의 기능 회복과 독립적인 일상생활에 가장 효과적이고 효율적인 중재 방법을 찾는 것은 더 큰 의미가 있을 것이다.
결 론
본 메타분석의 목적은 최근 5년 동안의 뇌졸중 상지 재활에 적용된 로봇 중재들을 조사하고 그 효과성을 통계적으로 알아보기 위함이었다. 로봇 중재의 효과성을 분석하기 위하여 종속변인을 ‘상지기능’과 ‘일상생활동작’으로 분류하여 각각의 통합적인 효과크기를 산출하였다. 분석결과 ‘상지기능’과 ‘일상생활동작’에 대한 로봇 중재의 효과크기는 모두 ‘작은 효과크기’로 나타났다. 뇌졸중 상지 재활에 있어서 로봇 중재와 전통적인 치료를 동일한 시간으로 제공한다면 로봇 중재 치료의 효과가 더 월등하다고 볼 수는 없을 것이다. 그러므로 임상 현장에서는 환자 개인의 특성에 맞는 가장 효율적인 치료 방법을 선택하여야 하고, 기존 상지 재활의 보완적인 측면으로 로봇 중재를 적용하는 것이 적절할 것이다.
Notes
No potential conflict of interest relevant to this article was reported.